
Coding4Fun Drone 🚁 posts
- Introduction to DJI Tello
- Analyzing Python samples code from the official SDK
- Drone Hello World ! Takeoff and land
- Tips to connect to Drone WiFi in Windows 10
- Reading data from the Drone, Get battery level
- Sample for real time data read, Get Accelerometer data
- How the drone camera video feed works, using FFMPEG to display the feed
- Open the drone camera video feed using OpenCV
- Performance and OpenCV, measuring FPS
- Detect faces using the drone camera
- Detect a banana and land!
- Flip when a face is detected!
- How to connect to Internet and to the drone at the same time
- Video with real time demo using the drone, Python and Visual Studio Code
- Using custom vision to analyze drone camera images
- Drawing frames for detected objects in real-time in the drone camera feed
- Save detected objects to local files, images and JSON results
- Save the Drone camera feed into a local video file
- Overlay images into the Drone camera feed using OpenCV
- Instance Segmentation from the Drone Camera using OpenCV, TensorFlow and PixelLib
- Create a 3×3 grid on the camera frame to detect objects and calculate positions in the grid
- Create an Azure IoT Central Device Template to work with drone information
- Create a Drone Device for Azure IoT Central
- Send drone information to Azure IoT Central
- Using GPT models to generate code to control the drone. Using ChatGPT
- Generate code to control the 🚁 drone using Azure OpenAI Services or OpenAI APIs, and Semantic Kernel
Hi !
Final post, so let’s recap
We have a device template representing a drone, tracking accelerometer, battery and temperature values.
We have created a new device to twin our drone in Azure IoT Central. And, copy the connect information: ScopeId, DeviceId and Key.
Let’s use a “get data from drone demo” and publish this information to Azure IoT Central.
I’ll share the complete file below, however let’s take a look at the main app code.
- The following code block iterates 300 times while is reading drone information.
- In each iteration, it send to the drone devices the accelerometer values. These are drone telemetry capabilities.
- Every 10 iterations, it also update other drone capabilities: battery and temperature. These are drone properties.
# MAIN APP
battery = 0
agx = 0
agy = 0
agz = 0
temph = 0
templ = 0
i = 0
while i < 300:
i = i + 1
sendReadCommand('battery?')
await drone.send_telemetry(agx, agy, agz)
if (i % 10) == 0:
await drone.send_properties(temph, templ, battery)
time.sleep(1)
Once we run the app, Azure IoT Central dashboard will show the real-time information from the drone. If the drone is flying and reporting accelerometer values, the agx, agy, agz chart will display the values related to axis x, y and z.
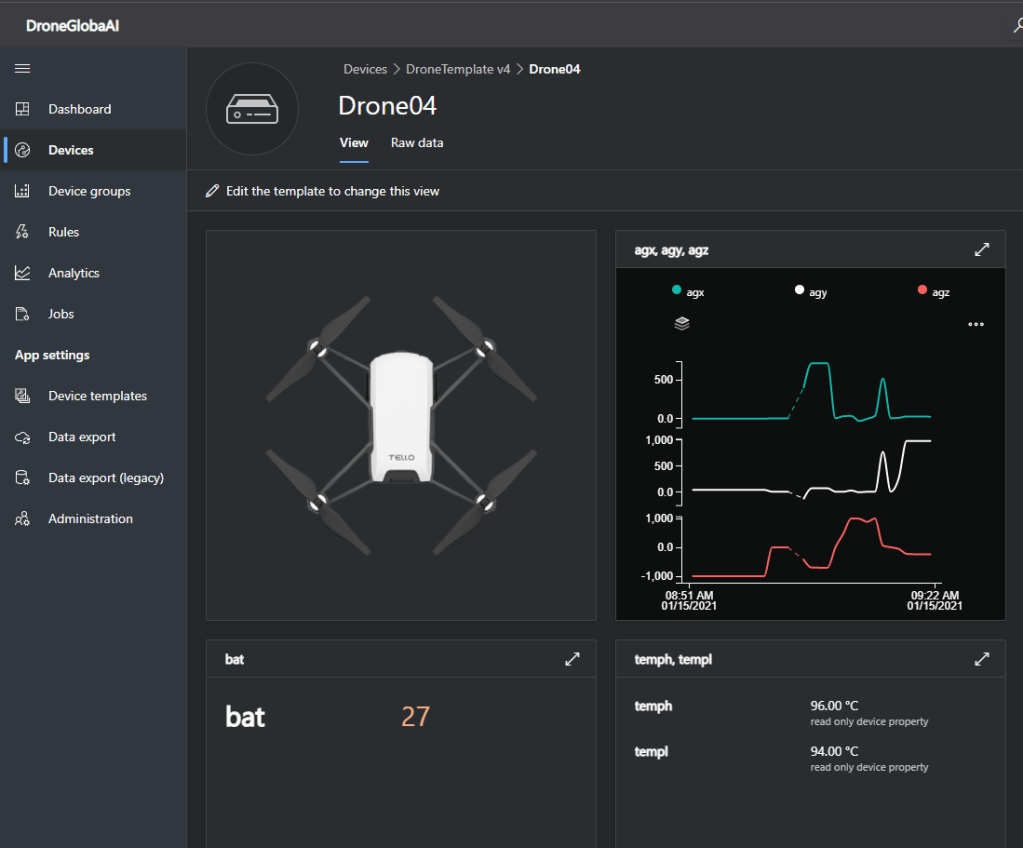
Disclaimer: I declared the temperature unit as Celsius. You can quickly realize that the values are in Farenheight.
And as promised here is the full code for this demo.
In the next post we will connect everything together !
Happy coding!
Greetings
El Bruno
More posts in my blog ElBruno.com.
More info in https://beacons.ai/elbruno
References

¿Con ganas de ponerte al día?
En Lemoncode te ofrecemos formación online impartida por profesionales que se baten el cobre en consultoría:
- Si tienes ganas de ponerte al día con Front End (ES6, Typescript, React, Angular, Vuejs…) te recomendamos nuestros Máster Front End: https://lemoncode.net/master-frontend#inicio-banner
- Si te quieres poner al día en Backend (stacks .net y nodejs), te aconsejamos nuestro Bootcamp Backend: https://lemoncode.net/bootcamp-backend#bootcamp-backend/banner
- Y si tienes ganas de meterte con Docker, Kubernetes, CI/CD…, tenemos nuestro Bootcamp Devops: https://lemoncode.net/bootcamp-devops#bootcamp-devops/inicio

Leave a comment